#
Overview
There is an emerging paradigm shift from ‘Internet AI’ towards ‘Embodied AI’ in the computer vision, NLP, and broader AI communities. In contrast to Internet AI’s focus on learning from datasets of images, videos, and text curated from the internet, embodied AI enables learning through interaction with the surrounding environment.
The goal of this workshop is to bring together researchers from the fields of computer vision, language, graphics, and robotics to share and discuss the current state of intelligent agents that can:
- See: perceive their environment through vision or other senses.
- Talk: hold a natural language dialog grounded in their environment.
- Act: navigate and interact with their environment to accomplish goals.
- Reason: consider and plan for the long-term consequences of their actions.
The Embodied AI 2020 workshop will be held in conjunction with CVPR 2020 in Seattle, WA over two days, Jun 14 and Jun 15. It will feature a host of invited talks covering a variety of topics in Embodied AI, three exciting challenges, and two live panel discussions.
#
Live Sessions
Panel. The panel consists of researchers who have built various simulation environments and physics engines.
Topics. The topics are based on questions, likely involving the need for simulation, progress in developing AI agents in simulation, need for photo-realism, physics engines for simulation, multi-agent capabilities, sim-to-real, the future of simulators, accessibility of simulation environments, and more!

Panel. The panel consists of speakers at this workshop
Topics. The topics are based on questions, likely involving cognitive development in humans, progress in embodied AI tasks, sim-2-real transfer, robotics, embodied AI for all, and more!
#
Invited Talks

UC Berkeley

Indiana

Uber ATG Toronto
University of Toronto

DeepMind

UIUC

FAIR, UC Berkeley
CMU (Starting Fall 2020)

NVIDIA, UW

FAIR

Georgia Tech

Georgia Tech

Alpha Drive

Eval AI
Georgia Tech
#
Challenges

The Embodied AI 2020 workshop will host three exciting challenges focusing on the problems of point navigation, object navigation, and the transfer of models from simulated environments to the real world. More details regarding data, submission instructions, and timelines can be found on the individual challenge websites.
Although these challenges use three different simulation engines, the APIs, action, observation spaces, and agent models are unified! Thus, participants are encouraged to participate in all challenges as these can use identical setups.
In more detail, the challenges relate to each other as follows:
| iGibson | Habitat | RoboTHOR | |
|---|---|---|---|
| Problem | PointNav | PointNav, ObjNav | ObjNav |
| Test Environment | Real | Simulation | Real |
| Agent | LoCoBot | ||
| Observations | RGB-D | ||
| Actions | Continuous | Discrete | Discrete |
#
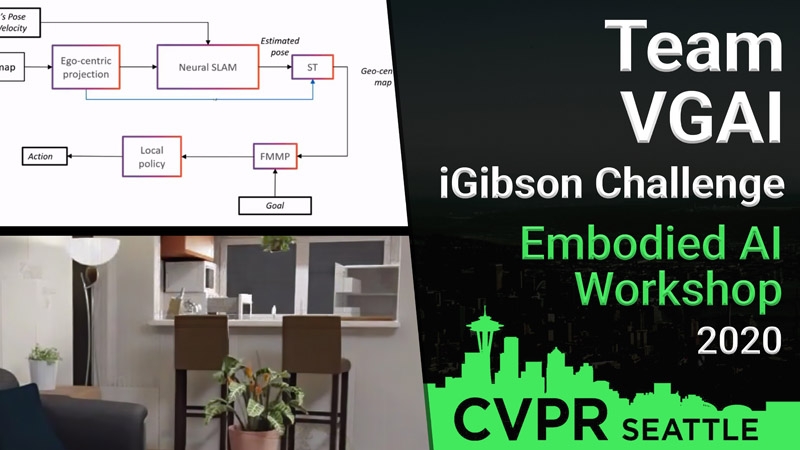
Challenge Results
Organizer Video

Winners



Organizer Video

ObjectNav Winners
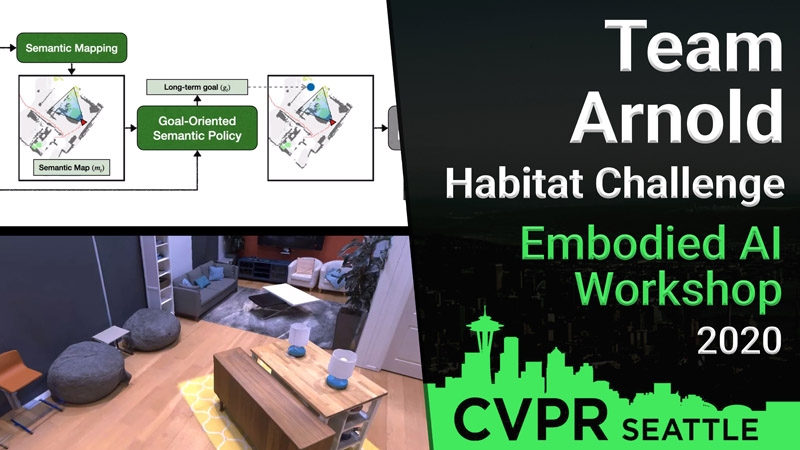
PointNav Winners

Organizer Video

#
Organizers

NVIDIA


GaTech, FAIR

SFU

GaTech

AI2, UW

Apple, UW

FAIR


UDC, CITIC

FAIR

AI2, UW

TRI

Intel

AI2

Oregon State

Zoox

Stanford

CVC, UAB

FAIR
UC Berkeley

Stanford
AI2, UW

GaTech, FAIR

Intel

SFU, FAIR

AI2

DFKI

FAIR



Stanford

GaTech

EPFL
#
Sponsors

